Циклические алгоритмы
Слайды и текст этой презентации
| Слайд №1 | |
 |
Исполнитель РОБОТ Циклический алгоритм Презентация к уроку информатики. 9 класс Тема: Управление и алгоритмы Автор: Юдин Андрей Борисович МКОУ Плесская СОШ |
| Слайд №2 | |
 |
FOR i:=1 TO N DO BEGIN действие1; действие2; END; FOR i:=1 TO N DO действие1; действие2; 1 |
| Слайд №3 | |
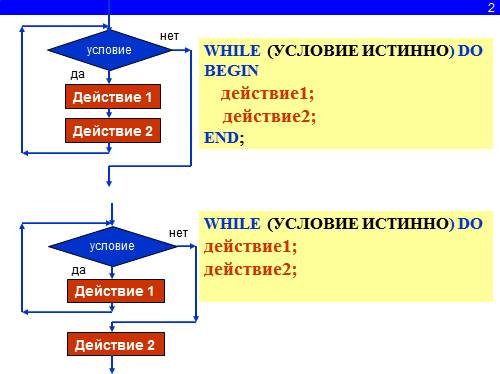 |
2 WHILE (УСЛОВИЕ ИСТИННО) DO BEGIN действие1; действие2; END; WHILE (УСЛОВИЕ ИСТИННО) DO действие1; действие2; |
| Слайд №4 | |
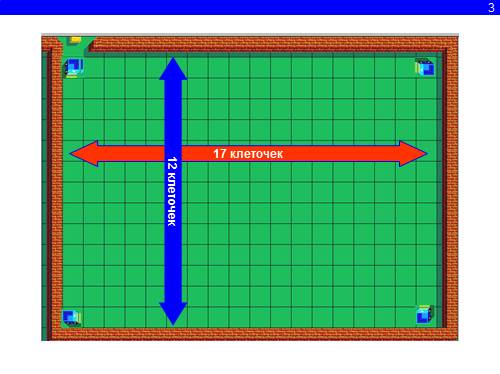 |
3 17 клеточек 12 клеточек |
| Слайд №5 | |
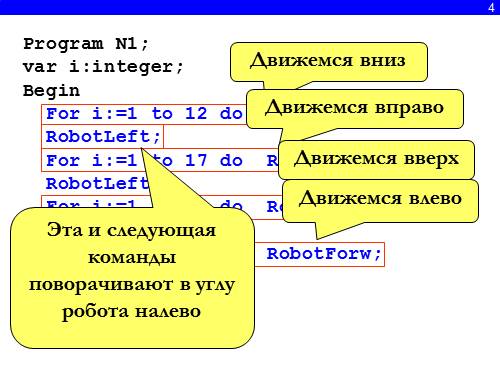 |
4 Program N1; var i:integer; Begin For i:=1 to 12 do RobotForw; RobotLeft; For i:=1 to 17 do RobotForw; RobotLeft; For i:=1 to 12 do RobotForw; RobotLeft; For i:=1 to 17 do RobotForw; RobotLeft; end. Движемся вниз Движемся вправо Движемся вверх Движемся влево Эта и следующая команды поворачивают в углу робота налево |
| Слайд №6 | |
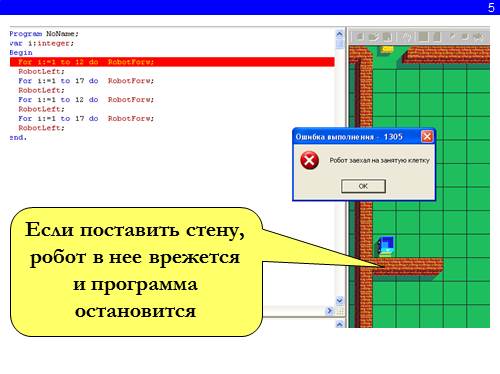 |
5 Если поставить стену, робот в нее врежется и программа остановится |
| Слайд №7 | |
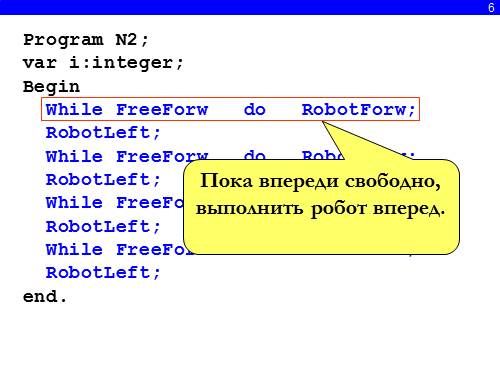 |
6 Program N2; var i:integer; Begin While FreeForw do RobotForw; RobotLeft; While FreeForw do RobotForw; RobotLeft; While FreeForw do RobotForw; RobotLeft; While FreeForw do RobotForw; RobotLeft; end. Пока впереди свободно, выполнить робот вперед. |
| Слайд №8 | |
 |
7 |
| Слайд №9 | |
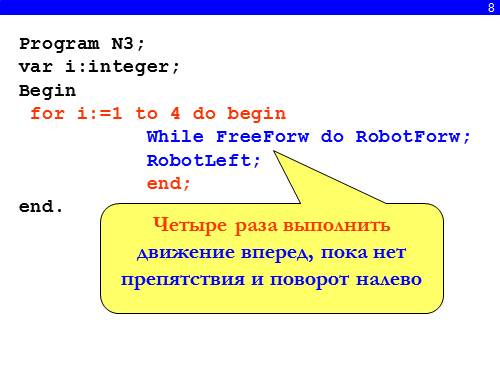 |
8 Program N3; var i:integer; Begin for i:=1 to 4 do begin While FreeForw do RobotForw; RobotLeft; end; end. Четыре раза выполнить движение вперед, пока нет препятствия и поворот налево |
| Слайд №10 | |
 |
9 Четыре раза выполнить движение вперед, пока нет препятствия, и поворот налево |
| Слайд №11 | |
 |
10 Задания для самостоятельной работы Задание 1. У левой стены обстановки в произвольном месте ставится препятствие. Робот должен доехать до точки 1 и вернуться в исходное состояние. Примечание: использовать три |
| Слайд №12 | |
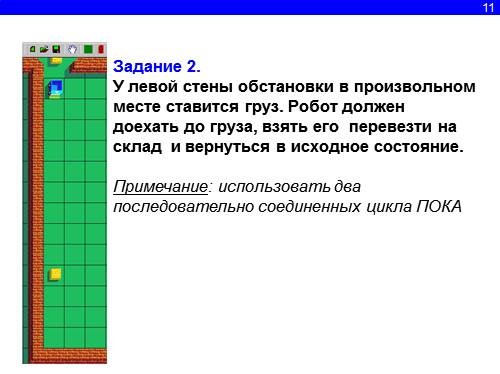 |
11 Задание 2. У левой стены обстановки в произвольном месте ставится груз. Робот должен доехать до груза, взять его перевезти на склад и вернуться в исходное состояние. Примечание: использовать два |
| Слайд №13 | |
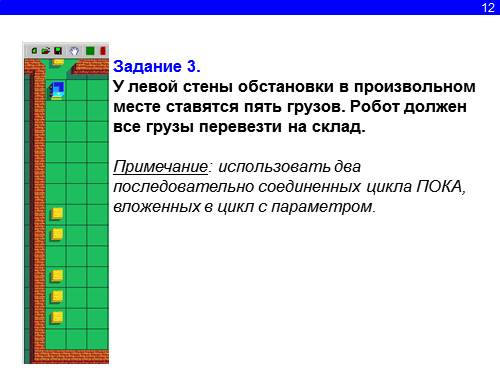 |
12 Задание 3. У левой стены обстановки в произвольном месте ставятся пять грузов. Робот должен все грузы перевезти на склад. Примечание: использовать два |
| Слайд №14 | |
 |
13 Пример 1 Робот находится перед входом в коридор. Необходимо отметить все клетки внутри коридора, и вернуться обратно |
| Слайд №15 | |
 |
14 Program N7; Begin RobotForw; While not FreeLeft do begin Select; RobotForw; end; RobotBack; While not FreeLeft do RobotBack; end. Делаем шаг вперед для входа в туннель Пока слева есть стена, отмечаем клетку и делаем шаг вперед Возвращаемся обратно в туннель Пока с лева стена, движемся на шаг назад |
| Слайд №16 | |
 |
15 Пример 2 Имеются две стены поставленные углом. Длины стен произвольные. Робот находится в углу между стенами (см. рисунок). Необходимо составить программу в которой робот отмечает все клетки на внутренней части стены. Конечное положение робота произвольно. |
| Слайд №17 | |
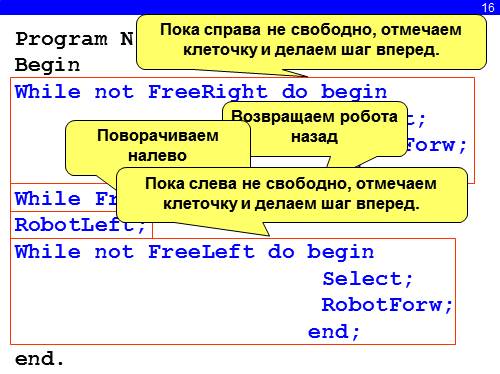 |
16 Program N8; Begin While not FreeRight do begin Select; RobotForw; end; While FreeBack do RobotBack; RobotLeft; While not FreeLeft do begin Select; RobotForw; end; end. Пока справа не свободно, отмечаем клеточку и делаем шаг вперед. Возвращаем робота назад Поворачиваем налево Пока слева не свободно, отмечаем клеточку и делаем шаг вперед. |
| Слайд №18 | |
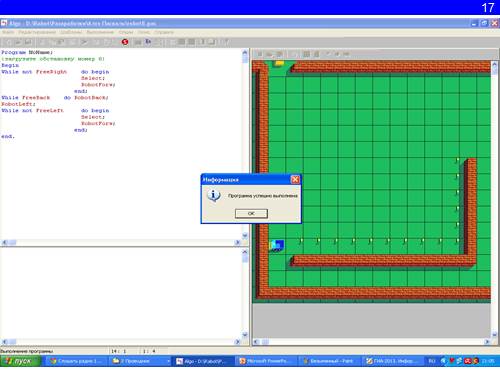 |
17 |
| Слайд №19 | |
 |
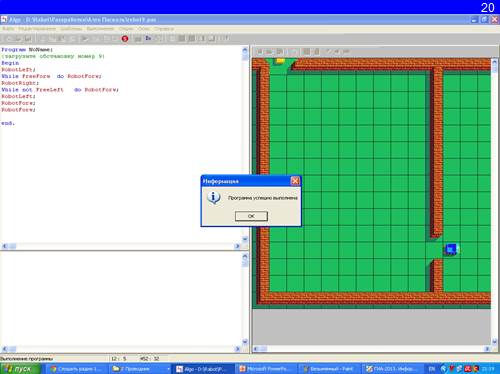
18 Пример 3 Обстановку перекрывает стена, делящая обстановку на две части. В стене есть проход размером в клетку в произвольном месте . Необходимо составить программу в которой робот находит этот проход и переходит на другую часть обстановки. |
| Слайд №20 | |
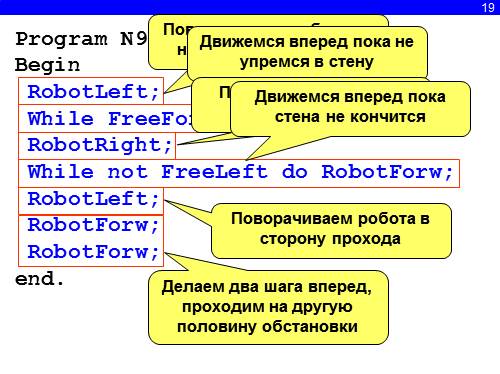 |
19 Program N9; Begin RobotLeft; While FreeForw do RobotForw; RobotRight; While not FreeLeft do RobotForw; RobotLeft; RobotForw; RobotForw; end. Поворачиваем робота по направлению к стене. Движемся вперед пока не упремся в стену Поворачиваем робота вдоль стены Движемся вперед пока стена не кончится Поворачиваем робота в сторону прохода Делаем два шага вперед, проходим на другую половину обстановки |
| Слайд №21 | |
 |
20 |
| Слайд №22 | |
 |
21 Задания для самостоятельной работы Задание 1. Дана стена в виде ступенек, количество ступенек произвольно. Необходимо отметить все клеточки в углах стены. Конечное положение робота произвольно. Примечание: использовать один цикл ПОКА |
| Слайд №23 | |
 |
22 Задание 2. Вдоль левой стены обстановки расположены в произвольных местах 5 грузов. Необходимо перевезти эти грузы к противоположной стене, как показано на рисунке. Примечание: использовать один цикл с параметром и три вложенных в него цикла ПОКА |
| Слайд №24 | |
 |
23 Список используемой литературы: Информатика. Базовый курс. 9 класс. И. Семакин, Л. Залогова, С. Русаков, Л Шестакова, Москва БИНОМ. Лаборатория знаний 2010 год 2. Информатика. Учебник для 7 класса. Л. Босова. Москва БИНОМ. Лаборатория знаний 2010 год 3. Подготовка к ГИА 9 по информатике 2013. Диагностические работы. Н.В. Вареникова, В.Э. Шереметьев. Москва издательство МЦНМО, 2013 год. 4. http://petriv.ho.ua/algo/rus/ — система программирования Алго — Паскаль и справка по ней. Автор Василий Петрив. |